
Composição
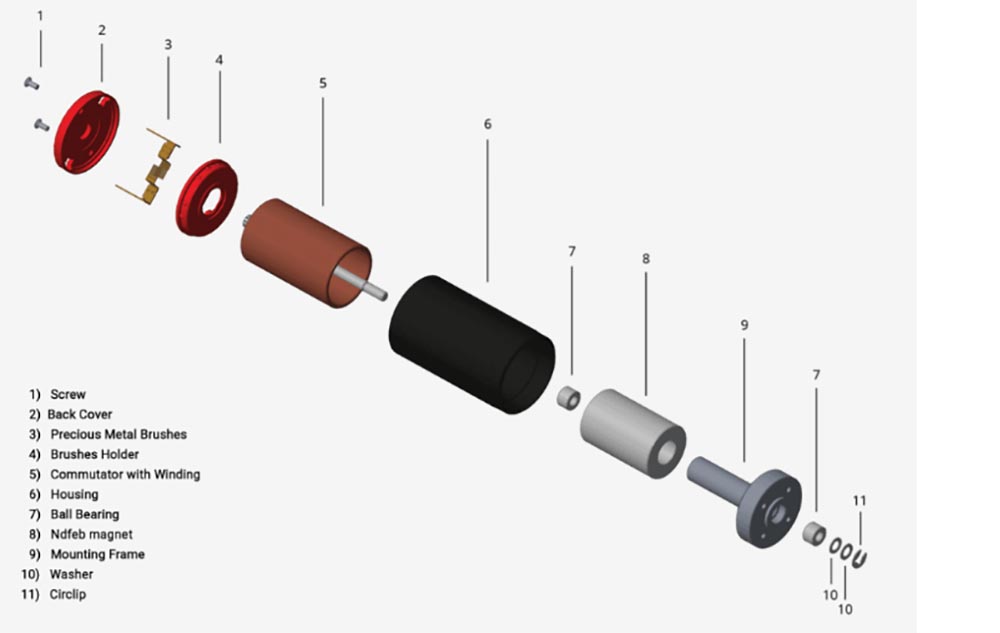
1. Motor CC de ímã permanente:
É composto por polos do estator, rotores, escovas, carcaças, etc.
Os polos do estator são feitos de ímãs permanentes (aço magnético permanente), compostos por ferrite, alnico, neodímio-ferro-boro e outros materiais. De acordo com sua forma estrutural, podem ser divididos em vários tipos, como o tipo cilíndrico e o tipo pastilha.
O rotor é geralmente feito de chapas laminadas de aço silício, e o fio esmaltado é enrolado entre as duas ranhuras do núcleo do rotor (há três enrolamentos em três ranhuras), e as juntas são soldadas respectivamente nas chapas metálicas do comutador.
A escova é um componente condutor que conecta a fonte de alimentação ao enrolamento do rotor, possuindo duas propriedades: condutividade e resistência ao desgaste. As escovas de motores de ímã permanente utilizam lâminas metálicas de um único elemento, escovas de grafite metálica ou escovas de grafite eletroquímica.
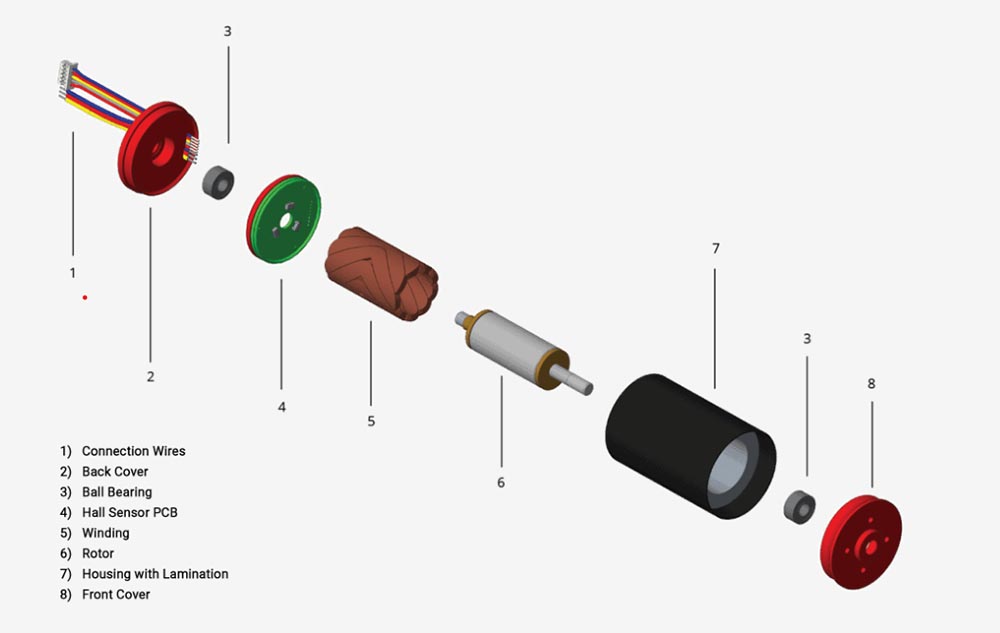
2. Motor CC sem escovas:
É composto por um rotor de ímã permanente, um estator com enrolamento multipolar, um sensor de posição, entre outros componentes. O motor CC sem escovas caracteriza-se por não possuir escovas e por utilizar dispositivos de comutação semicondutores (como elementos Hall) para realizar a comutação eletrônica, ou seja, dispositivos de comutação eletrônica substituem os comutadores de contato e as escovas tradicionais. Apresenta como vantagens alta confiabilidade, ausência de faíscas na comutação e baixo ruído mecânico.
O sensor de posição comuta a corrente do enrolamento do estator em uma determinada ordem, de acordo com a mudança na posição do rotor (ou seja, detecta a posição do polo magnético do rotor em relação ao enrolamento do estator e gera um sinal de detecção de posição na posição determinada, que é processado pelo circuito de conversão de sinal e então removido. Controla o circuito de chaveamento de potência e comuta a corrente do enrolamento de acordo com uma determinada relação lógica).

2. Motor CC sem escovas:
É composto por um rotor de ímã permanente, um estator com enrolamento multipolar, um sensor de posição, entre outros componentes. O motor CC sem escovas caracteriza-se por não possuir escovas e por utilizar dispositivos de comutação semicondutores (como elementos Hall) para realizar a comutação eletrônica, ou seja, dispositivos de comutação eletrônica substituem os comutadores de contato e as escovas tradicionais. Apresenta como vantagens alta confiabilidade, ausência de faíscas na comutação e baixo ruído mecânico.
O sensor de posição comuta a corrente do enrolamento do estator em uma determinada ordem, de acordo com a mudança na posição do rotor (ou seja, detecta a posição do polo magnético do rotor em relação ao enrolamento do estator e gera um sinal de detecção de posição na posição determinada, que é processado pelo circuito de conversão de sinal e então removido. Controla o circuito de chaveamento de potência e comuta a corrente do enrolamento de acordo com uma determinada relação lógica).
3. Motor brushless de ímã permanente de alta velocidade:
É composto por núcleo do estator, rotor de aço magnético, engrenagem solar, embreagem de desaceleração, carcaça do cubo, entre outros. Um sensor Hall pode ser montado na tampa do motor para medição de velocidade.
Comparação entre motores com escovas e motores sem escovas
A diferença no princípio de eletrificação entre um motor com escovas e um motor sem escovas: Um motor com escovas é comutado mecanicamente por uma escova de carvão e um comutador. Um motor sem escovas é comutado eletronicamente por um controlador baseado em um sinal de indução.
O princípio de alimentação de energia dos motores com escovas e dos motores sem escovas é diferente, assim como sua estrutura interna. No caso dos motores de cubo, o modo de saída do torque (se é desacelerado por um mecanismo de redução por engrenagens) também é diferente, e sua estrutura mecânica é igualmente distinta.
motor CC escovado sem núcleo
motor CC sem núcleo e sem escovas
Data da publicação: 03/06/2019